GAMES101 作业0
上次学习GAMES101是在大三, 但是由于作业要求是用虚拟机+Ubuntu, 我嫌太麻烦, 就不想做作业了, 但是经过这两年的学习, 我觉得不动手实践是学不会的, 所以这次我决定丛头开始, 把作业和课程都再学习一遍
我的所有GAMES101作业的仓库地址: GAMES101-Assignments
环境配置
在老师给出的pdf作业要求中, 我们需要下载虚拟机并安装Ubuntu, 并在虚拟机中使用VSCode进行编程, 但是我觉得这样太麻烦, 于是我决定在Windows下使用Visual Studio进行编程, 但是由于Eigen库是Linux下的, 所以我需要在Windows下安装Eigen库
Eigen库
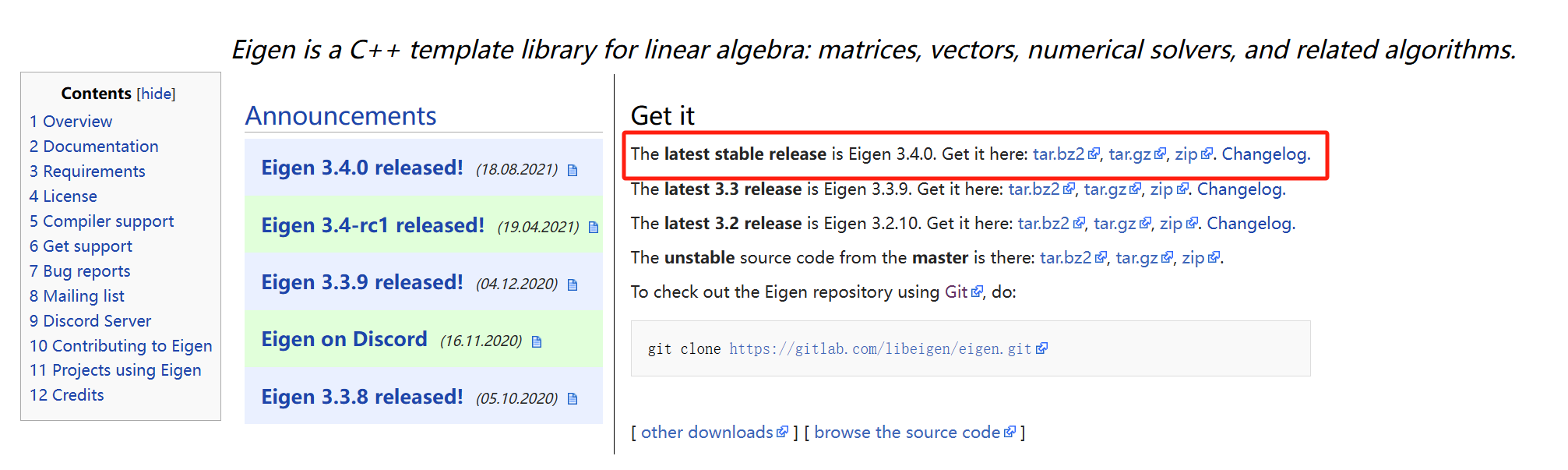
Eigen是一个C++模板库, 提供了线性代数的基本功能, 可以在此网站下载: Eigen
我们选择latest stable release, 下载.zip文件
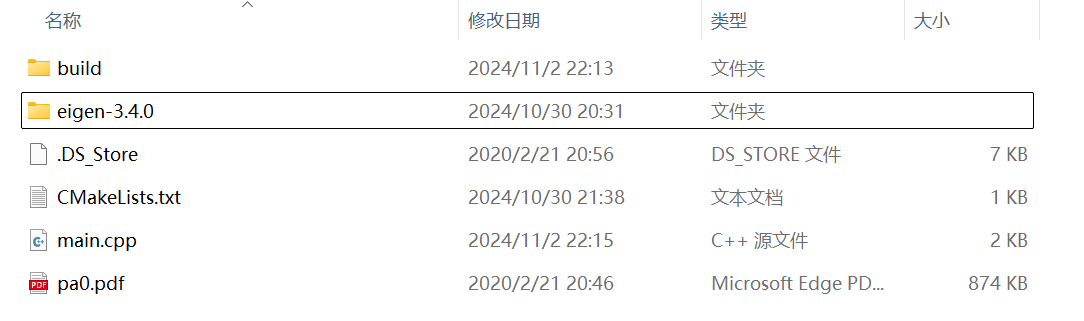
解压后将文件夹放在合适的位置, 我选择放在和作业0文件夹pa0内
由于老师提供的CMakeLists.txt中配置的路径是适用于Linux的, 所以我们需要修改CMakeLists.txt
- 将以下内容删掉
1
2
find_package(Eigen3 REQUIRED)
include_directories(EIGEN3_INCLUDE_DIR)
- 修改为Eigen的包含目录
1
include_directories("${CMAKE_SOURCE_DIR}/eigen-3.4.0")
使用CMake生成VS项目
本文默认已经安装了CMake和Visual Studio, 如果没有安装, 请自行安装
在pa0文件夹下新建一个build文件夹, 并在此文件夹中打开cmd, 输入以下命令
1
cmake ..
等待CMake生成VS项目, 生成成功后, 在build文件夹中会生成一个.sln文件, 双击打开即可
VS配置
在VS中打开项目后, 我们需要配置项目, 以便能够正确运行
首先, 在右侧的解决方案资源管理器中, 右键点击Transformation项目, 选择属性
在VC++目录中, 选择包含目录, 添加之前解压的Eigen的包含目录(注意要加上分号)
1
F:\Projects\GAMES101-Assignments\pa0\eigen-3.4.0;
不过之前我们已经在CMakeLists.txt中配置了, 所以这里不需要再配置
接着, 在main.cpp中, 我们需要修改include路径
删除原有的:
1
2
#include<eigen3/Eigen/Core>
#include<eigen3/Eigen/Dense>
改为:
1
2
#include<Eigen/Core>
#include<Eigen/Dense>
保存即可
编译运行
在VS中, 选择Transformation项目, 右键, 设置为启动项目, 然后按F5编译运行即可
作业内容
已有内容
代码中已经实现了基本的数学运算:
1
2
3
4
5
6
7
8
// Basic Example of cpp
std::cout << "Example of cpp \n";
float a = 1.0, b = 2.0;
std::cout << a << std::endl;
std::cout << a/b << std::endl;
std::cout << std::sqrt(b) << std::endl;
std::cout << std::acos(-1) << std::endl;
std::cout << std::sin(30.0/180.0*acos(-1)) << std::endl;
基本的向量加减及向量与标量相乘:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
// Example of vector
std::cout << "Example of vector \n";
// vector definition
Eigen::Vector3f v(1.0f,2.0f,3.0f);
Eigen::Vector3f w(1.0f,0.0f,0.0f);
// vector output
std::cout << "Example of output \n";
std::cout << v << std::endl;
// vector add
std::cout << "Example of add \n";
std::cout << v + w << std::endl;
// vector scalar multiply
std::cout << "Example of scalar multiply \n";
std::cout << v * 3.0f << std::endl;
std::cout << 2.0f * v << std::endl;
基本的矩阵输出:
1
2
3
4
5
6
7
8
9
// Example of matrix
std::cout << "Example of matrix \n";
// matrix definition
Eigen::Matrix3f i,j;
i << 1.0, 2.0, 3.0, 4.0, 5.0, 6.0, 7.0, 8.0, 9.0;
j << 2.0, 3.0, 1.0, 4.0, 6.0, 5.0, 9.0, 7.0, 8.0;
// matrix output
std::cout << "Example of output \n";
std::cout << i << std::endl;
作业目标及解决方案
1. 根据数乘的形式与向量点积的形式探索点积的用法
点积的定义是一个向量点乘另一个向量, 得到一个标量, 用于计算两个向量之间的夹角
\[\mathbf{A} \cdot \mathbf{B} = | \mathbf{A} | | \mathbf{B} | \cos \theta = A_x B_x + A_y B_y + A_z B_z\]其中,
- $ \mathbf{A} $ 表示向量, 加上绝对值符号表示向量的模长
- $ \theta $ 表示两个向量之间的夹角
1
2
3
4
5
6
7
// 向量点乘及几何意义
Eigen::Vector3f a(1.0f, 2.0f, 3.0f);
Eigen::Vector3f b(0.0f, 1.0f, 2.0f);
std::cout << "a dot b = " << a.dot(b) << std::endl;
std::cout << "|a| = " << a.norm() << std::endl;
std::cout << "|b| = " << b.norm() << std::endl;
std::cout << "cos(a,b) = " << a.dot(b) / (a.norm() * b.norm()) <<std::endl;
2. 探索矩阵加减、数乘、矩阵乘法、矩阵乘向量的用法
矩阵是一个二维数组, 用于表示线性变换:
\[\begin{bmatrix} a & b \\ c & d \end{bmatrix}\]矩阵与矩阵相加减, 实际上是对应元素相加减:
\[\begin{bmatrix} a & b \\ c & d \end{bmatrix} + \begin{bmatrix} e & f \\ g & h \end{bmatrix} = \begin{bmatrix} a+e & b+f \\ c+g & d+h \end{bmatrix}\]矩阵与标量相乘, 实际上是矩阵的每个元素与标量相乘:
\[\begin{bmatrix} a & b \\ c & d \end{bmatrix} \times 2 = \begin{bmatrix} 2a & 2b \\ 2c & 2d \end{bmatrix}\]矩阵乘法, 实际上是矩阵的行乘以另一个矩阵的列:
\[\begin{bmatrix} a & b \\ c & d \end{bmatrix} \times \begin{bmatrix} e & f \\ g & h \end{bmatrix} = \begin{bmatrix} ae+bg & af+bh \\ ce+dg & cf+dh \end{bmatrix}\]矩阵乘向量, 实际上是矩阵的行乘以向量:
\[\begin{bmatrix} a & b \\ c & d \end{bmatrix} \times \begin{bmatrix} e \\ f \end{bmatrix} = \begin{bmatrix} ae+bf \\ ce+df \end{bmatrix}\]1
2
3
4
5
6
7
8
9
10
11
// 矩阵加减、数乘、矩阵乘法、矩阵乘向量
Eigen::Matrix3f m1;
Eigen::Matrix3f m2;
m1 << 1, 2, 3, 4, 5, 6, 7, 8, 9;
m2 << 1, 0, 0, 0, 1, 0, 0, 0, 1;
std::cout << "m1 + m2 = \n" << m1 + m2 << std::endl;
std::cout << "m1 - m2 = \n" << m1 - m2 << std::endl;
std::cout << "m1 * 2 = \n" << m1 * 2 << std::endl;
std::cout << "m1 * m2 = \n" << m1 * m2 << std::endl;
Eigen::Vector3f v1(1.0f, 2.0f, 3.0f);
std::cout << "m1 * v1 = \n" << m1 * v1 << std::endl;
3. 点的旋转, 平移
给定一个点P=(2,1),将该点绕原点先逆时针旋转45◦,再平移(1,2),计算出变换后点的坐标(要求用齐次坐标进行计算)
齐次坐标是一种将点的坐标和向量的坐标统一起来的方法, 通过增加一个维度, 将点和向量统一为一个4维向量, 通过矩阵乘法, 可以实现旋转, 平移等操作
例如: 如果一个点P=(x, y), 通过齐次坐标, 可以表示为P=(x, y, 1), 如果一个向量V=(x, y), 通过齐次坐标, 可以表示为V=(x, y, 0)
我们先声明一个点的齐次坐标:
1
Eigen::Vector3f p(2.0f, 1.0f, 1.0f);
要求绕原点逆时针旋转45°, 我们可以声明旋转矩阵, 注意, 原本旋转矩阵是一个二维矩阵:
但是由于点使用了齐次坐标, 所以旋转矩阵也需要使用齐次坐标:
\[\begin{bmatrix} \cos \theta & -\sin \theta & 0 \\ \sin \theta & \cos \theta & 0 \\ 0 & 0 & 1 \end{bmatrix}\]其中, \(\theta = 45° = \frac{\pi}{4}\)
注意, 如果要求不是绕着原点旋转, 而是绕着其他点旋转, 需要先平移, 再旋转, 再平移回来
例如, 要让点(x, y)绕点(a, b)旋转45°:
- 平移到原点:
(x, y)移动为(x-a, y-b) - 旋转45°: 旋转矩阵
R(45°)作用在(x-a, y-b)上 - 平移回去: 将旋转后的点
(x', y')平移回去, 得到最终点(x', y') + (a, b)
数学表达式为:
\[\begin{bmatrix} x' \\ y' \end{bmatrix} = \begin{bmatrix} a \\ b \end{bmatrix} + R(45°) \times \begin{bmatrix} x-a \\ y-b \end{bmatrix}\]回到问题, 我们声明旋转矩阵:
1
2
Eigen::Matrix3f r;
r << cos(M_PI/4), -sin(M_PI/4), 0, sin(M_PI/4), cos(M_PI/4), 0, 0, 0, 1;
但是M_PI是Linux下的宏定义, Windows下没有, 所以我们需要自己定义:
1
#define M_PI 3.14159265358979323846
平移矩阵用于将点平移到新的位置上去, 普通的平移操作不能用常规的2D矩阵表示, 因为平移操作是一个向量加法:
\[\begin{bmatrix} x' \\ y' \end{bmatrix} = \begin{bmatrix} x + a \\ y + b \end{bmatrix}\]这里的平移量是
\[\begin{bmatrix} a \\ b \end{bmatrix}\]如果我们需要用矩阵表示平移, 则需要将其扩展成齐次坐标的形式:
\[\begin{bmatrix} 1 & 0 & a \\ 0 & 1 & b \\ 0 & 0 & 1 \end{bmatrix}\]平移点则将此矩阵作用在点上:
\[\begin{bmatrix} x' \\ y' \\ 1 \end{bmatrix} = \begin{bmatrix} 1 & 0 & a \\ 0 & 1 & b \\ 0 & 0 & 1 \end{bmatrix} \times \begin{bmatrix} x \\ y \\ 1 \end{bmatrix} = \begin{bmatrix} x + a \\ y + b \\ 1 \end{bmatrix}\]现在我们声明平移矩阵:
1
2
Eigen::Matrix3f t;
t << 1, 0, 1, 0, 1, 2, 0, 0, 1;
最后, 我们将旋转矩阵和平移矩阵作用在点上:
1
2
3
4
std::cout << "p = \n" << p << std::endl;
std::cout << "r = \n" << r << std::endl;
std::cout << "t = \n" << t << std::endl;
std::cout << "t * r * p = \n" << t * r * p << std::endl;
顺序很重要, 一般来说, 先旋转, 再平移
完整代码
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
#include<cmath>
#include<Eigen/Core>
#include<Eigen/Dense>
#include<iostream>
#define M_PI 3.14159265358979323846
int main(){
// 向量点乘及几何意义
Eigen::Vector3f a(1.0f, 2.0f, 3.0f);
Eigen::Vector3f b(0.0f, 1.0f, 2.0f);
std::cout << "a dot b = " << a.dot(b) << std::endl;
std::cout << "|a| = " << a.norm() << std::endl;
std::cout << "|b| = " << b.norm() << std::endl;
std::cout << "cos(a,b) = " << a.dot(b) / (a.norm() * b.norm()) << std::endl;
std::cout << "\n";
// 矩阵加减、数乘、矩阵乘法、矩阵乘向量
Eigen::Matrix3f m1;
Eigen::Matrix3f m2;
m1 << 1, 2, 3, 4, 5, 6, 7, 8, 9;
m2 << 1, 0, 0, 0, 1, 0, 0, 0, 1;
Eigen::Vector3f v1(1.0f, 2.0f, 3.0f);
std::cout << "m1 = \n" << m1 << std::endl;
std::cout << "m2 = \n" << m2 << std::endl;
std::cout << "v1 = \n" << v1 << std::endl;
std::cout << "m1 + m2 = \n" << m1 + m2 << std::endl;
std::cout << "m1 - m2 = \n" << m1 - m2 << std::endl;
std::cout << "m1 * 2 = \n" << m1 * 2 << std::endl;
std::cout << "m1 * m2 = \n" << m1 * m2 << std::endl;
std::cout << "m1 * v1 = \n" << m1 * v1 << std::endl;
std::cout << "\n";
// 点的旋转, 平移
// 给定一个点`P=(2,1)`,将该点绕原点先逆时针旋转`45◦`,再平移`(1,2)`,计算出变换后点的坐标(要求用 齐次坐标进行计算)
// 定义点P
Eigen::Vector3f p(2.0f, 1.0f, 1.0f);
// 旋转矩阵
Eigen::Matrix3f r;
r << cos(M_PI / 4), -sin(M_PI / 4), 0, sin(M_PI / 4), cos(M_PI / 4), 0, 0, 0, 1;
// 平移矩阵
Eigen::Matrix3f t;
t << 1, 0, 1, 0, 1, 2, 0, 0, 1;
// 计算变换后的点
std::cout << "p = \n" << p << std::endl;
std::cout << "r = \n" << r << std::endl;
std::cout << "t = \n" << t << std::endl;
std::cout << "t * r * p = \n" << t * r * p << std::endl;
return 0;
}