GAMES101 作业3
GAMES101 作业3
本次作业要求实现一个简单的光栅化渲染器, 实现法向量、颜色、纹理颜色的插值, 实现 Blinn-Phong 模型, 实现高度图以及置换映射
我的所有GAMES101作业的仓库地址: GAMES101-Assignments
投影矩阵修改
之前的投影矩阵感觉有点问题, 这里重新实现一下
修改main.cpp中的get_projection_matrix()函数, 实现投影矩阵的计算:
1
2
3
4
5
6
7
8
Eigen::Matrix4f projection;
float top = -tan(DEG2RAD(eye_fov/2.0f) * abs(zNear));
float right = top * aspect_ratio;
projection << zNear/right,0,0,0,
0,zNear/top,0,0,
0,0,(zNear+zFar)/(zNear-zFar),(2*zNear*zFar)/(zFar-zNear),
0,0,1,0;
return projection;
然后在gloabl.h中添加一个宏定义:
1
inline double DEG2RAD(double deg) {return deg * MY_PI/180;}
以上定义是为了将角度(deg)转换为弧度(rad), 以便在计算投影矩阵时使用
实现法向量、颜色、纹理颜色的插值
对应pdf任务1,2
修改rasterizer.cpp中的函数rasterize_triangle(const Triangle& t) : 在此处实现与作业2类似的插值算法, 实现法向量、颜色、纹理颜色的插值
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
//屏幕空间光栅化
void rst::rasterizer::rasterize_triangle(const Triangle& t, const std::array<Eigen::Vector3f, 3>& view_pos)
{
// TODO: 从你的HW3中获取三角形光栅化代码。
auto v = t.v;
// 计算三角形的包围盒(根据三个顶点的坐标的最大值和最小值)
float x_min = std::min(v[0].x(), std::min(v[1].x(), v[2].x()));
float x_max = std::max(v[0].x(), std::max(v[1].x(), v[2].x()));
float y_min = std::min(v[0].y(), std::min(v[1].y(), v[2].y()));
float y_max = std::max(v[0].y(), std::max(v[1].y(), v[2].y()));
// 根据包围盒的范围, 找到整数索引范围, 用std::floor和std::ceil取整
int x_min_int = std::floor(x_min);
int x_max_int = std::ceil(x_max);
int y_min_int = std::floor(y_min);
int y_max_int = std::ceil(y_max);
// 遍历包围盒内的像素点, 判断是否在三角形内部
for (int x = x_min_int; x <= x_max_int; x++) {
for (int y = y_min_int; y <= y_max_int; y++) {
// 找到像素中心点
float x_center = x + 0.5;
float y_center = y + 0.5;
// 检查是否在三角形内部
if (!insideTriangle(x_center, y_center, t.v)) {
continue;
}
// 计算重心坐标
auto [alpha, beta, gamma] = computeBarycentric2D(x_center, y_center, t.v);
// TODO: 在光栅化循环中:
// * v[i].w() 是顶点视图空间中的深度值 z。
// * Z 是当前像素的插值后视图空间深度。
// * zp 是位于 zNear 和 zFar 之间的深度,用于 z 缓冲。
// float Z = 1.0 / (alpha / v[0].w() + beta / v[1].w() + gamma / v[2].w());
// float zp = alpha * v[0].z() / v[0].w() + beta * v[1].z() / v[1].w() + gamma * v[2].z() / v[2].w();
// zp *= Z;
// 计算深度值
float Z = 1.0 / (alpha / v[0].w() + beta / v[1].w() + gamma / v[2].w());
float zp = alpha * v[0].z() / v[0].w() + beta * v[1].z() / v[1].w() + gamma * v[2].z() / v[2].w();
zp *= Z;
// 深度测试
int index = get_index(x, y); // 获取像素点的索引
if (zp >= depth_buf[index]) { // 深度测试: 如果当前像素点的深度值小于深度缓冲区中的深度值
continue;
}
// 更新深度缓冲区
depth_buf[index] = zp;
// TODO: 插值属性:
// auto interpolated_color
// auto interpolated_normal
// auto interpolated_texcoords
// auto interpolated_shadingcoords
auto interpolated_color = interpolate(alpha, beta, gamma, t.color[0], t.color[1], t.color[2], 1); // 插值颜色
auto interpolated_normal = interpolate(alpha, beta, gamma, t.normal[0], t.normal[1], t.normal[2], 1); // 插值法线
auto interpolated_texcoords = interpolate(alpha, beta, gamma, t.tex_coords[0], t.tex_coords[1], t.tex_coords[2], 1); // 插值纹理坐标
auto interpolated_shadingcoords = interpolate(alpha, beta, gamma, view_pos[0], view_pos[1], view_pos[2], 1); // 插值视图空间坐标
// 使用: fragment_shader_payload payload( interpolated_color, interpolated_normal.normalized(), interpolated_texcoords, texture ? &*texture : nullptr);
// 使用: payload.view_pos = interpolated_shadingcoords;
// 使用: 不要直接将三角形的颜色传递给帧缓冲区,而是先将颜色传递给着色器以获取最终颜色;
// 使用: auto pixel_color = fragment_shader(payload);
// // 构造片段着色器所需的 payload(片段着色器的输入)
fragment_shader_payload payload(
interpolated_color,
interpolated_normal.normalized(), // 法线需要归一化
interpolated_texcoords,
texture ? &*texture : nullptr // 如果有纹理则需要传递, 没有则是 nullptr
);
payload.view_pos = interpolated_shadingcoords; // 视图空间坐标
// 调用片段着色器
auto pixel_color = fragment_shader(payload);
// 将像素颜色存储到帧缓冲区
set_pixel(Eigen::Vector2i(x, y), pixel_color);
}
}
}
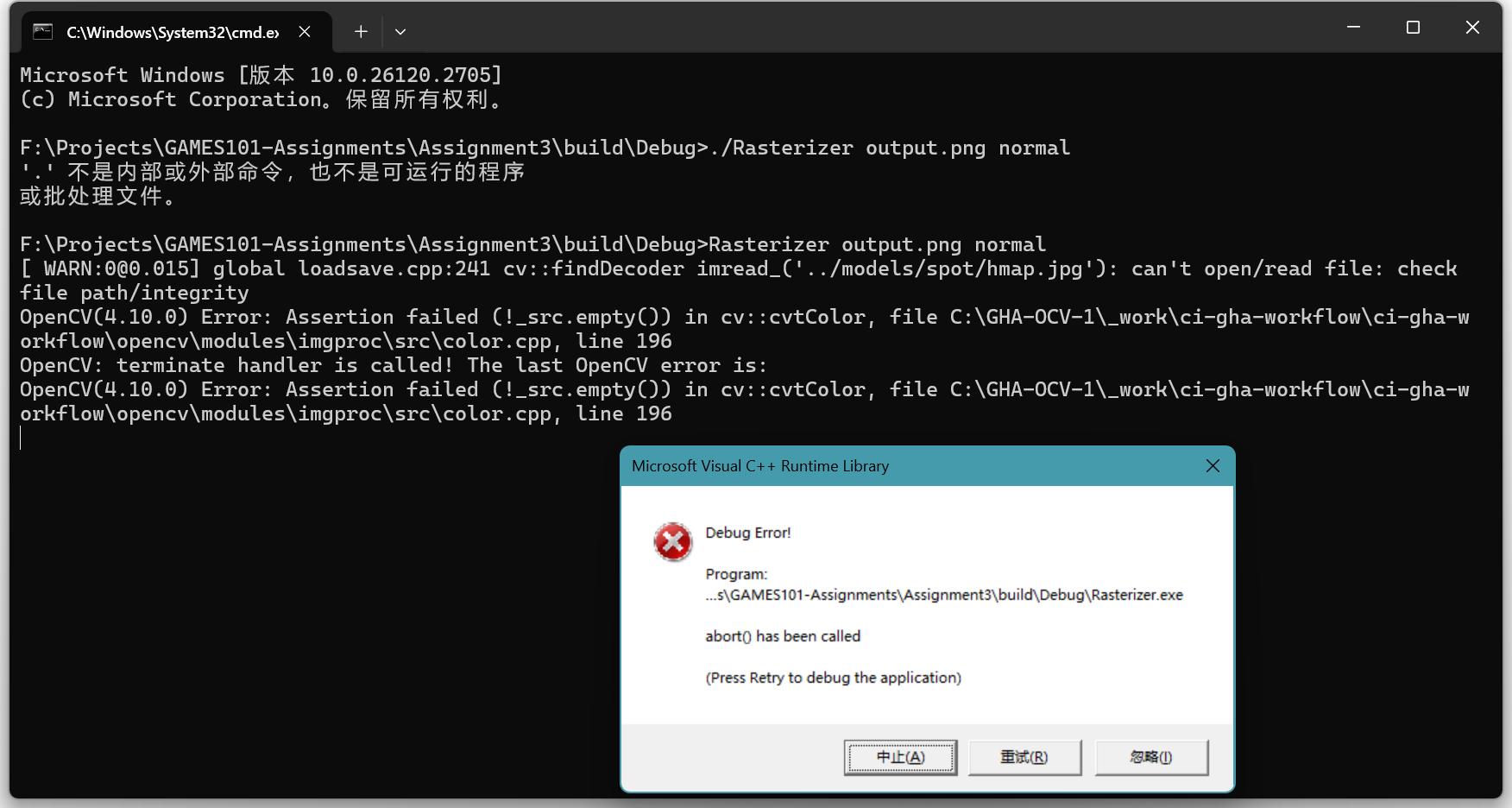
此时可以在build目录的Debug文件夹下运行项目:
1
Rasterizer output.png normal
注意, 由于Windows的VS项目中的相对路径与Linux的不同, 所以在Windows下运行时, 需要把models文件夹复制(或剪切)到build目录下, 否则会出现以下报错:
会在Debug文件夹下生成output.png文件, 此时的渲染结果如下:

在片段着色器中实现Blinn-Phong模型
对应pdf任务3
修改main.cpp中的phong_fragment_shader(const fragment_shader_payload& payload)函数, 实现Blinn-Phong模型:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
Eigen::Vector3f phong_fragment_shader(const fragment_shader_payload& payload)
{
Eigen::Vector3f ka = Eigen::Vector3f(0.005, 0.005, 0.005); // 环境光反射系数
Eigen::Vector3f kd = payload.color; // 漫反射系数(颜色)
Eigen::Vector3f ks = Eigen::Vector3f(0.7937, 0.7937, 0.7937); // 镜面反射系数
auto l1 = light{ {20, 20, 20}, {500, 500, 500} }; // 光源1
auto l2 = light{ {-20, 20, 0}, {500, 500, 500} }; // 光源2
std::vector<light> lights = { l1, l2 }; // 光源列表
Eigen::Vector3f amb_light_intensity{ 10, 10, 10 }; // 环境光强度
Eigen::Vector3f eye_pos{ 0, 0, 10 }; // 视点位置
float p = 150; // 镜面反射的指数
Eigen::Vector3f color = payload.color; // 片元颜色
Eigen::Vector3f point = payload.view_pos; // 片元位置
Eigen::Vector3f normal = payload.normal; // 片元法向量
Eigen::Vector3f result_color = {0, 0, 0};
for (auto& light : lights)
{
// TODO: For each light source in the code, calculate what the *ambient*, *diffuse*, and *specular*
// components are. Then, accumulate that result on the *result_color* object.
Eigen::Vector3f DiffuseColor, SpecularColor; // 漫反射光、镜面反射光
float r = (point - light.position).norm(); // 光源到片元的距离
Eigen::Vector3f currLightIntensity = light.intensity / (r * r); // 当前光源强度
Eigen::Vector3f view_dir = (eye_pos - point).normalized(); // 视线方向
Eigen::Vector3f light_dir = (light.position - point).normalized(); // 光线方向
Eigen::Vector3f normal_dir = normal.normalized(); // 法向量
Eigen::Vector3f h = (view_dir + light_dir).normalized(); // 半程向量
DiffuseColor = kd.cwiseProduct(currLightIntensity) * std::max(0.0f, normal_dir.dot(light_dir)); // 漫反射光
SpecularColor = ks.cwiseProduct(currLightIntensity) * std::pow(std::max(0.0f, normal_dir.dot(h)), p); // 镜面反射光
result_color += DiffuseColor + SpecularColor; // 累加漫反射光和镜面反射光
}
Eigen::Vector3f AmbientColor = ka.cwiseProduct(amb_light_intensity); // 环境光
result_color += AmbientColor; // 累加环境光: 环境光不用多次计算
return result_color * 255.f;
}
修改并保存后, 需要重新编译项目, 然后在build目录的Debug文件夹下运行以下命令以切换成Blinn-Phong模型渲染:
1
Rasterizer output.png phong
会在Debug文件夹下生成output.png文件, 此时的渲染结果如下:

本文由作者按照 CC BY 4.0 进行授权